Robotic Projects: Background and Structure

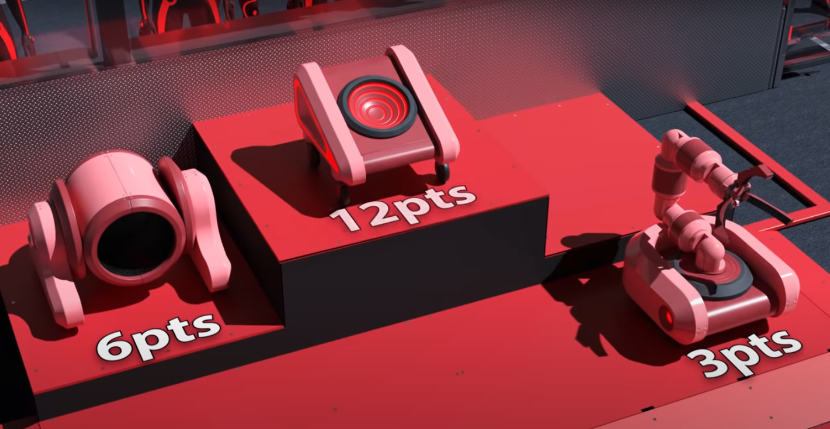
In the fall of 2017, I joined my high school robotics team, the Lindblom Electric Eagles. They compete in the FIRST Robotics Competition, or FRC for short. FRC is a high school robotics competition with regional competitions all over the world. If you win a regional you get to compete in the World’s Championship where all regional winners compete.As for the matches themselves, there are 2 alliances made up of 3 robots. Each alliance has to work together to complete specific tasks and gather more points than the opposing alliance.
My robotics team was split into 3 main teams, mechanical, electrical and programming. The mechanical team is in charge of the design and manufacturing of the components for our robot. The electrical team has to wire all the components together. The programming team develops all the software for the robot. I was a part of the programming team.
Since you can only spend 4 years on the team there is a progression system my team had. The first year on the team you learn how to program in Processing by completing problem sets. You don’t get to program the robot your first year, instead your task is to create a game by the end of the season to show off at the competition and engage people to our team. Second year you get to start programming the robot and get to implement simpler functions to the robot and also help the rookies when needed. Third and fourth year you have larger responsibilities with programming major functions to the robot and help organize the goals for the programming team that season. At this point you are also expected to be able to answer questions from judges during competitions and may have to give presentations.